Owli-AI 研究
Ultrasonic Waves to Support Human Echolocation
HCII (2018) - Paper
Florian von Zabiensky; Michael Kreutzer; Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Giessen, Germany
このページは機械翻訳で、現在編集レビュー前です。
ビジュアル

概要
この論文では、AHRUS というシステムを紹介しています。AHRUS は、パラメトリック 超音波を用いて、視覚障害者や失明者が周囲の情報を音として知覚できるようにする ことを目的としています。自己復調によって超音波の方向特性が保持されるため、 信号を自分の耳で定位できます。本稿では、プロトタイプの技術構成と初期利用の 考え方を説明し、4 名の参加者による初期評価も報告しています。従来の Flash Sonar に比べ、小さな構造や滑らかな表面に対して利点が示されました。
キーワード
- Human Echo Localization
- Audible Ultrasound Sonar
- Blind People
- Spatial Hearing
- Obstacle Detection
ダウンロード
図版
論文内のビジュアル 13 点。
-
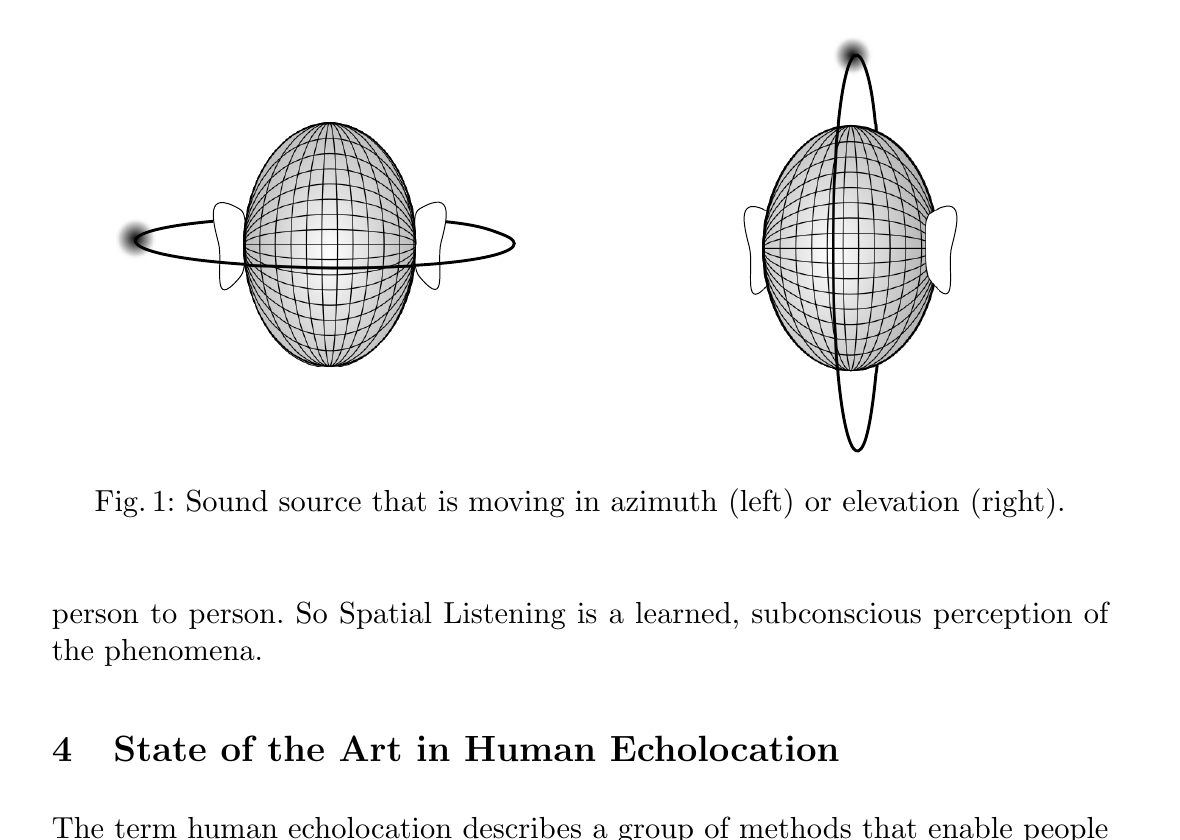
図1 方向表現の全体図。 -
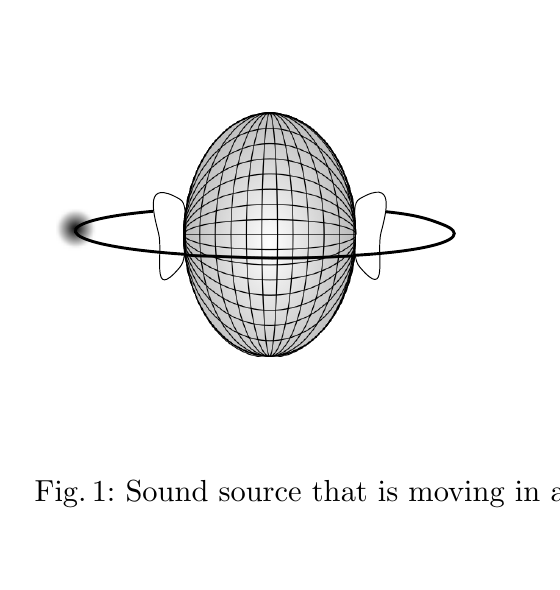
図1 左詳細(方位角)。 -
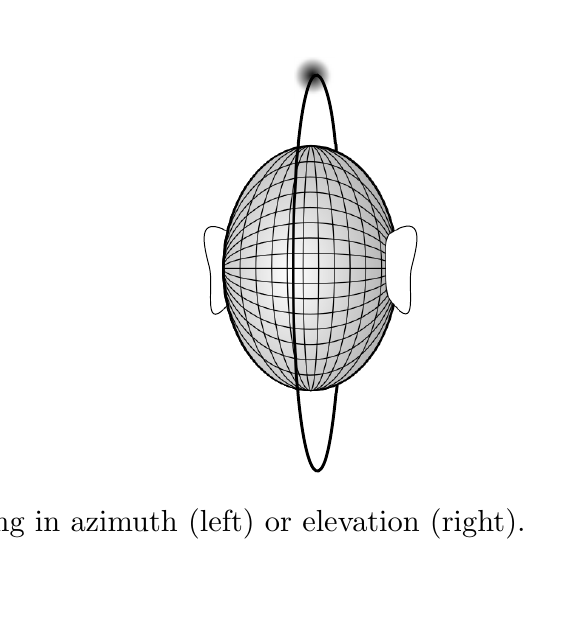
図1 右詳細(仰角)。 -
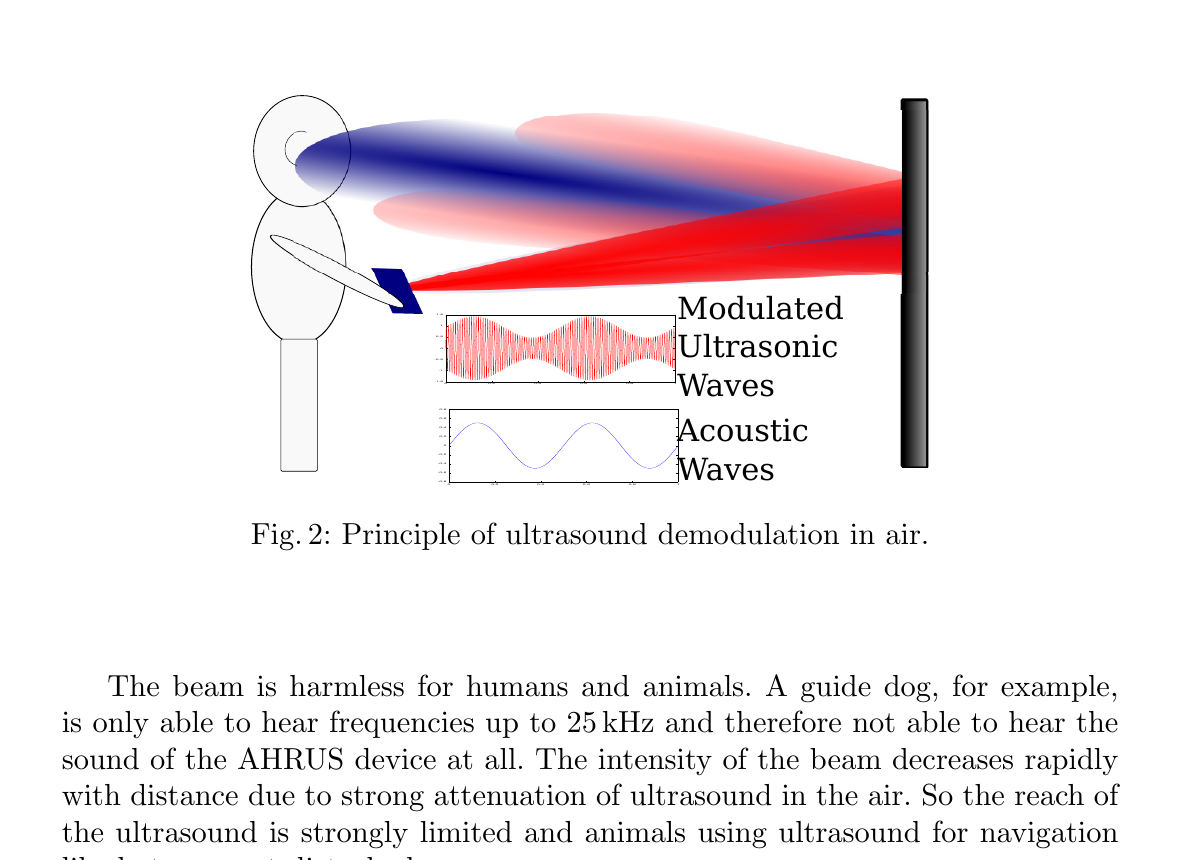
図2 超音波復調の原理。 -
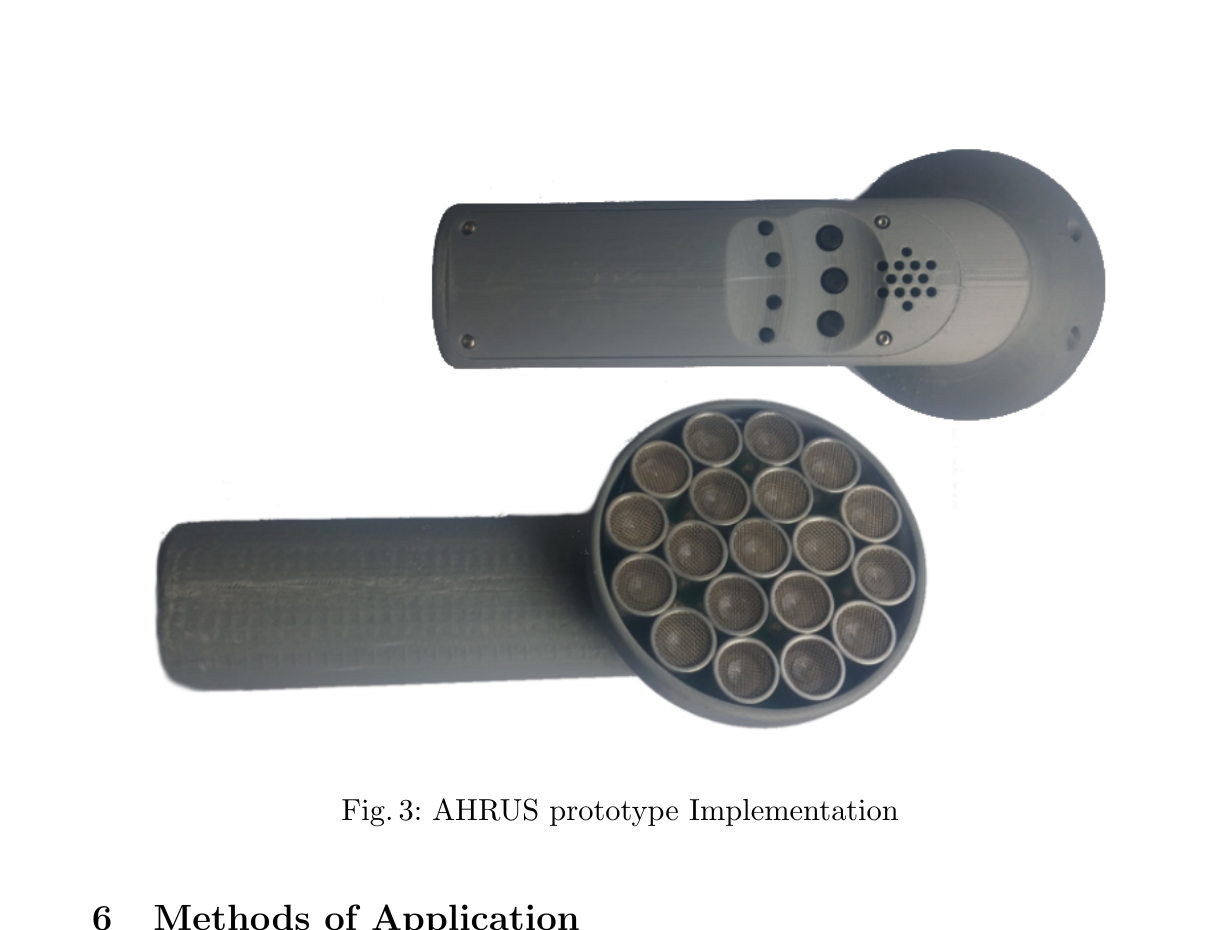
図3 プロトタイプ実装。 -
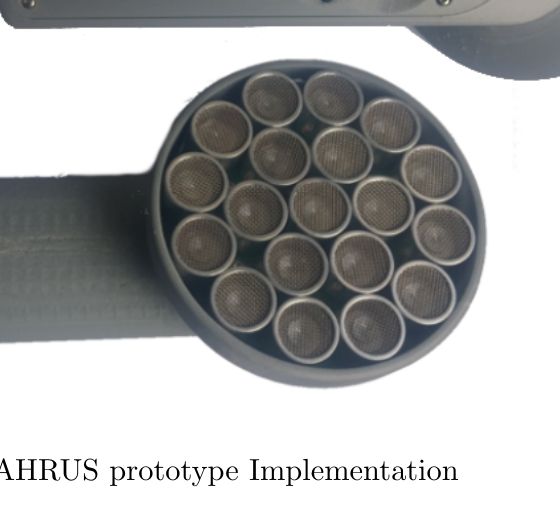
図3 トランスデューサアレイの詳細。 -
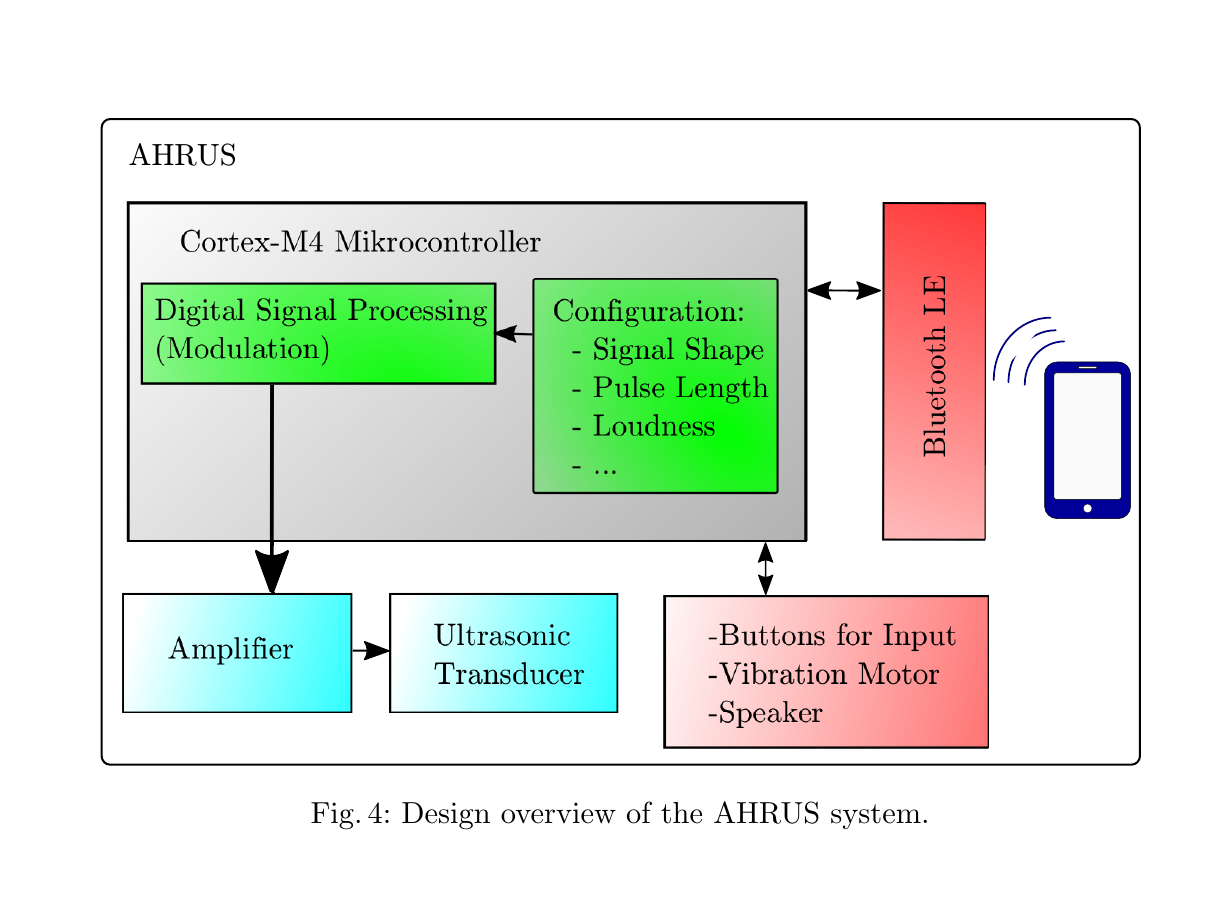
図4 AHRUS システム設計の概要。 -
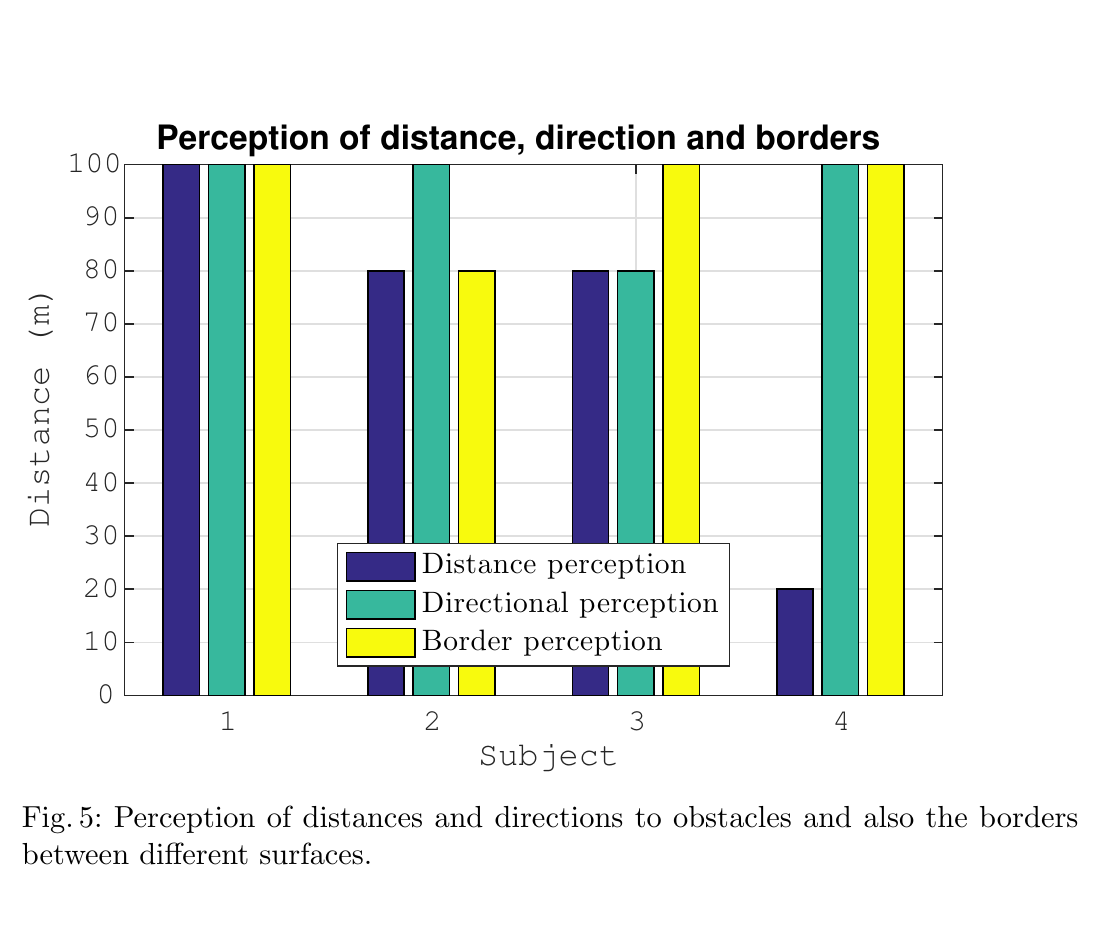
図5 距離・方向・境界知覚の結果。 -
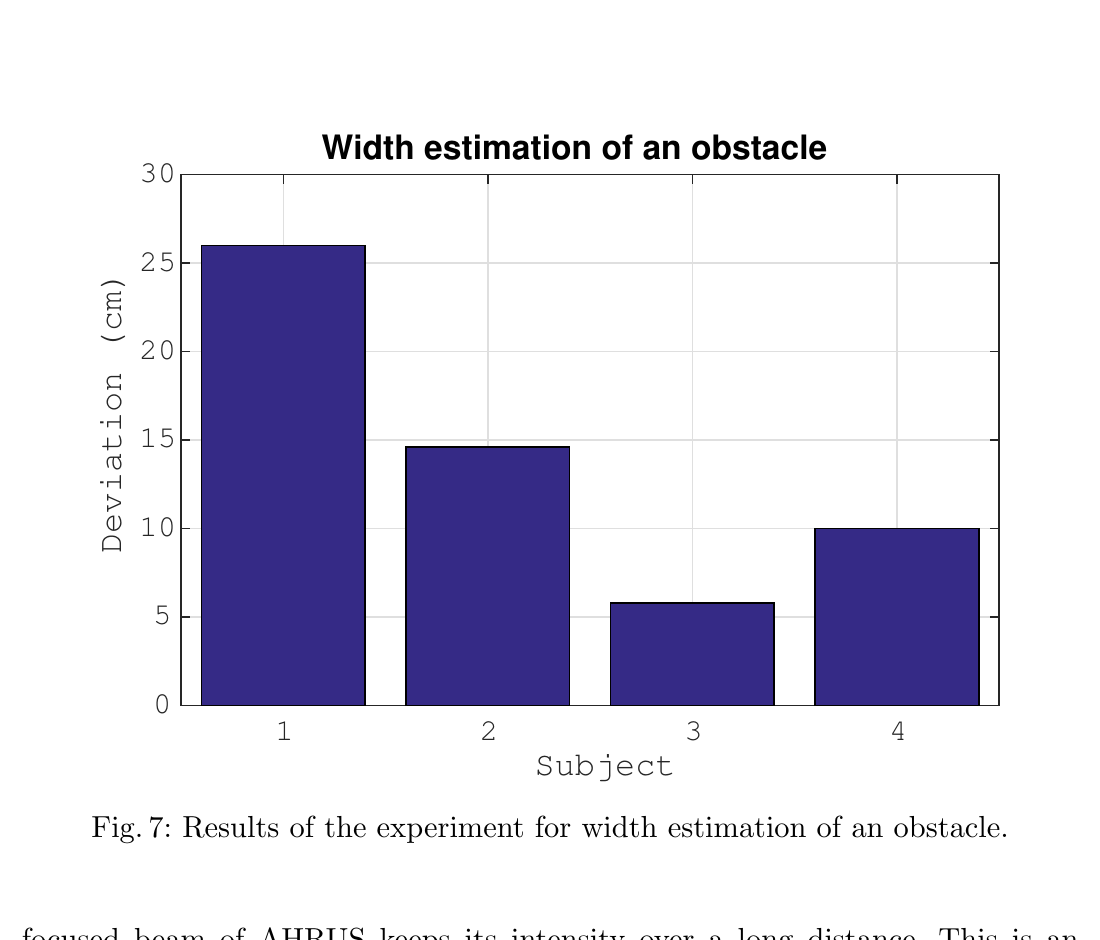
図6 障害物検出の距離しきい値。 -
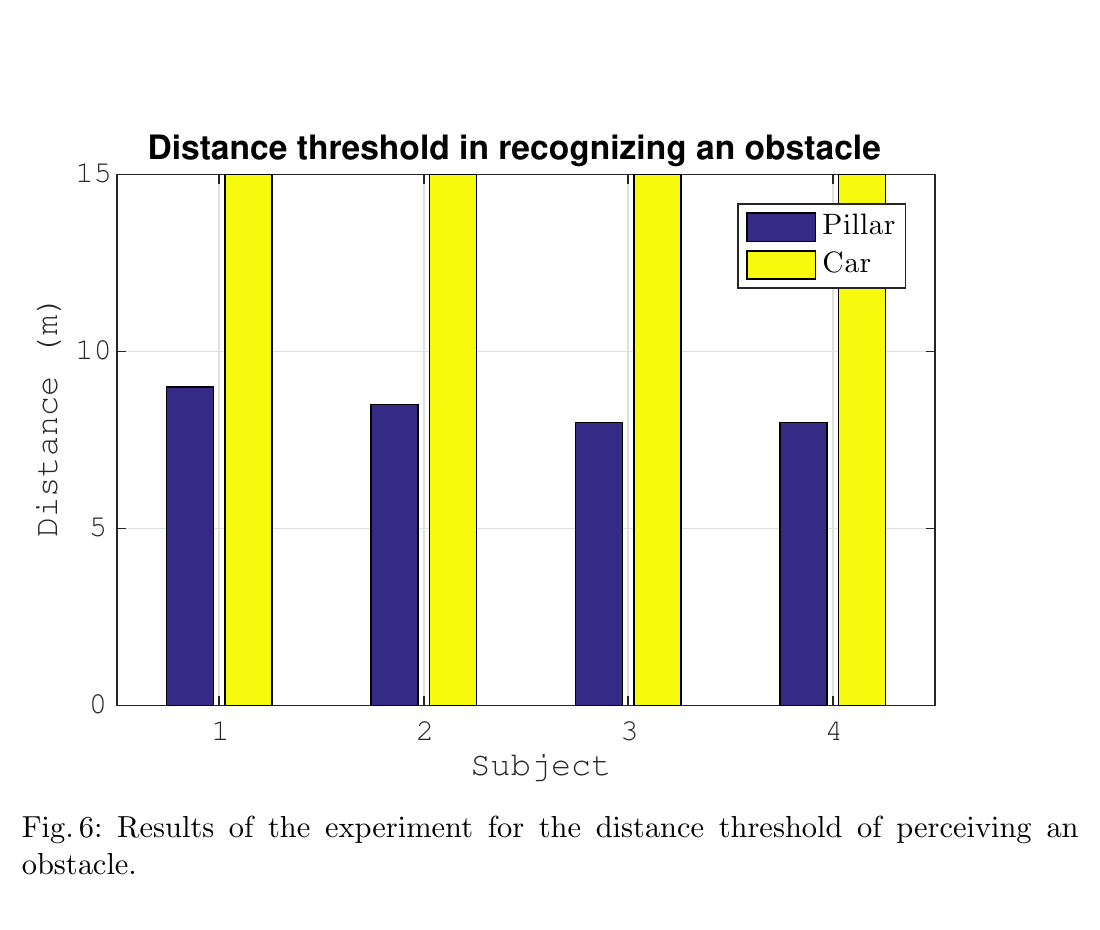
図7 障害物幅の推定。 -
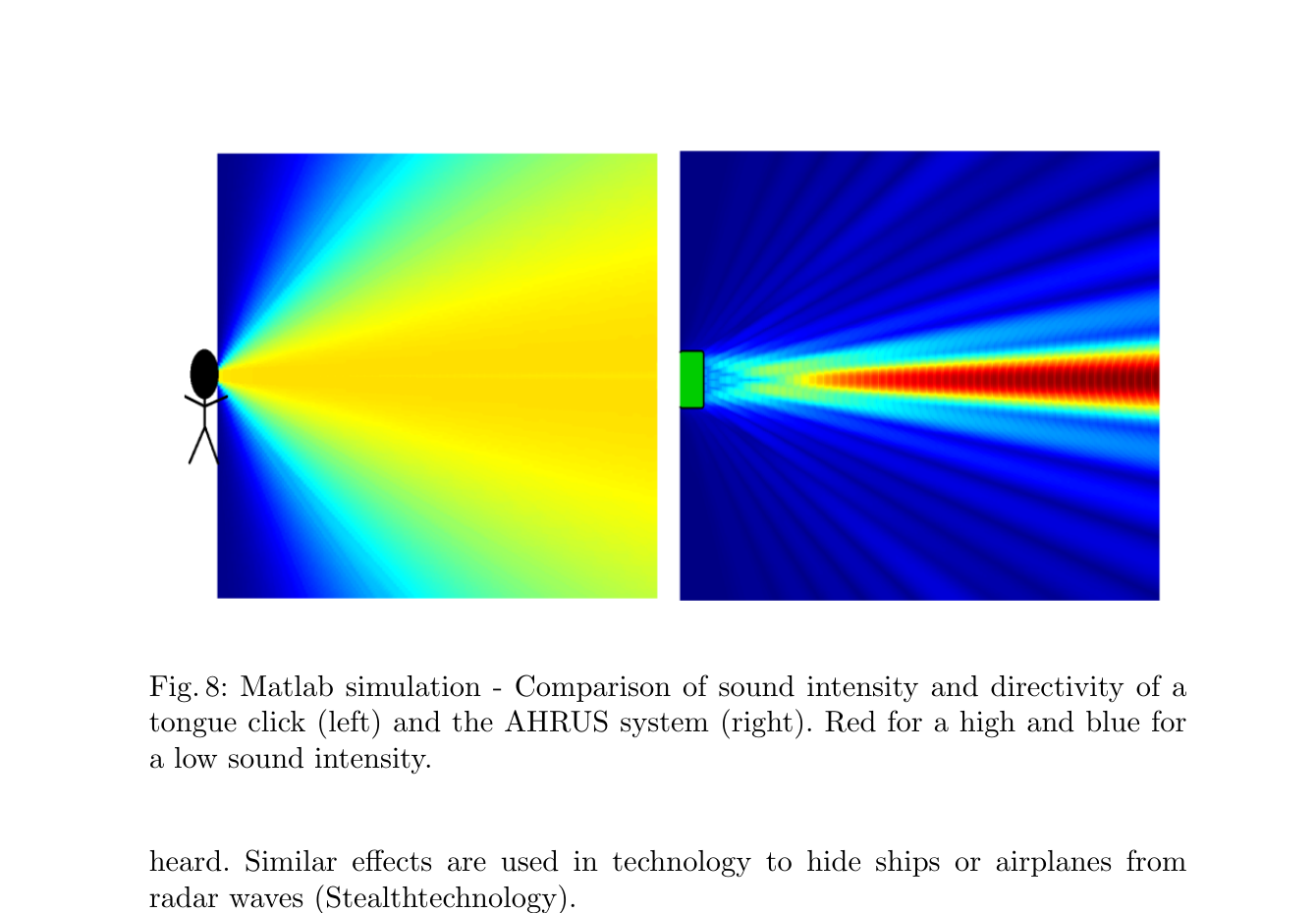
図8 指向性の全体比較。 -
図8 左詳細(Flash Sonar)。 -
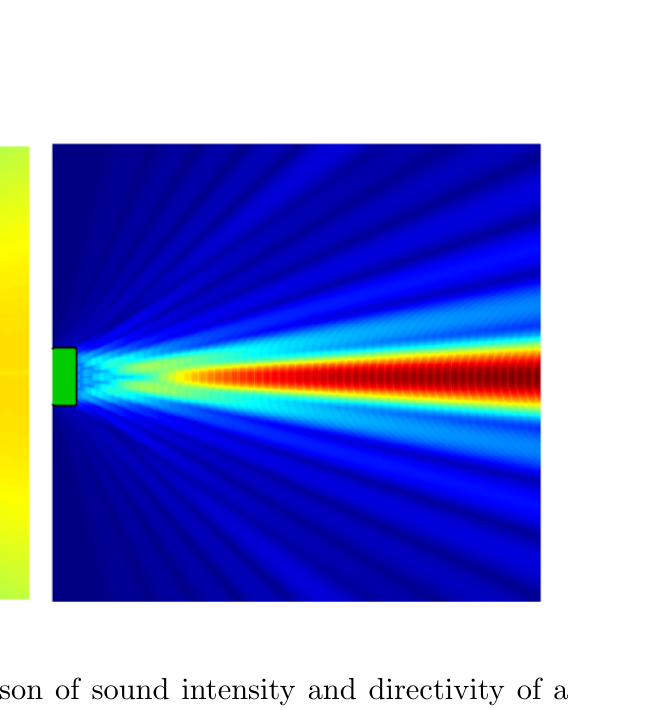
図8 右詳細(AHRUS)。












BibTeX
@inproceedings{vonzabiensky2018ahrus,
title = {Ultrasonic Waves to Support Human Echolocation},
author = {von Zabiensky, Florian and Kreutzer, Michael and Bienhaus, Diethelm},
booktitle = {HCII},
year = {2018}
}
補足情報
関連: AHRUS プロジェクト