Owli-AI 研究プロジェクト
AHRUS Audible High Resolution Ultrasonic Sonar
AHRUS は、可聴化された超音波によってエコーロケーションを支援する 電子的ガイドドッグの概念です。自然な空間認識をヘッドホンで置き換える のではなく、障害物や構造をより早く知覚できるようにすることを目指して います。
試作版
このページは機械翻訳で、現在編集レビュー前です。
- echolocation
- ultrasound
- assistive technology
- spatial hearing
- obstacle detection
プロジェクト概要
目的
AHRUS プロジェクトは、超音波を追加の定位チャンネルとして使い、視覚障害者や失明者の移動支援に活用できるかを研究しています。特に小さな構造物や知覚しにくい表面を、日常でより早く認識できるようにすることが目的です。
仕組み(概要)
集中的な超音波ビームを変調して送信し、空気中の非線形音響によって一部を可聴信号へ変換します。物体からの反射は利用者自身の耳で知覚でき、空間的に位置付けることができます。
従来のエコーロケーションとの違い
舌打ちによる従来の能動的エコーロケーションは波長が長く、細かな構造には選択性が低い場合があります。AHRUS は短い超音波を使うため、より強い指向性で走査でき、特定の場面では構造の境界や小さな障害物をより明確に区別できます。
現在の状況(プロトタイプと初期テスト)
機能するプロトタイプが存在します。最初の評価では 4 名の参加者を対象に、距離、方向、幅推定、境界知覚を調べ、従来の Flash Sonar と比較しました。
成果
図版
AHRUS 論文からのビジュアル 13 点。
-
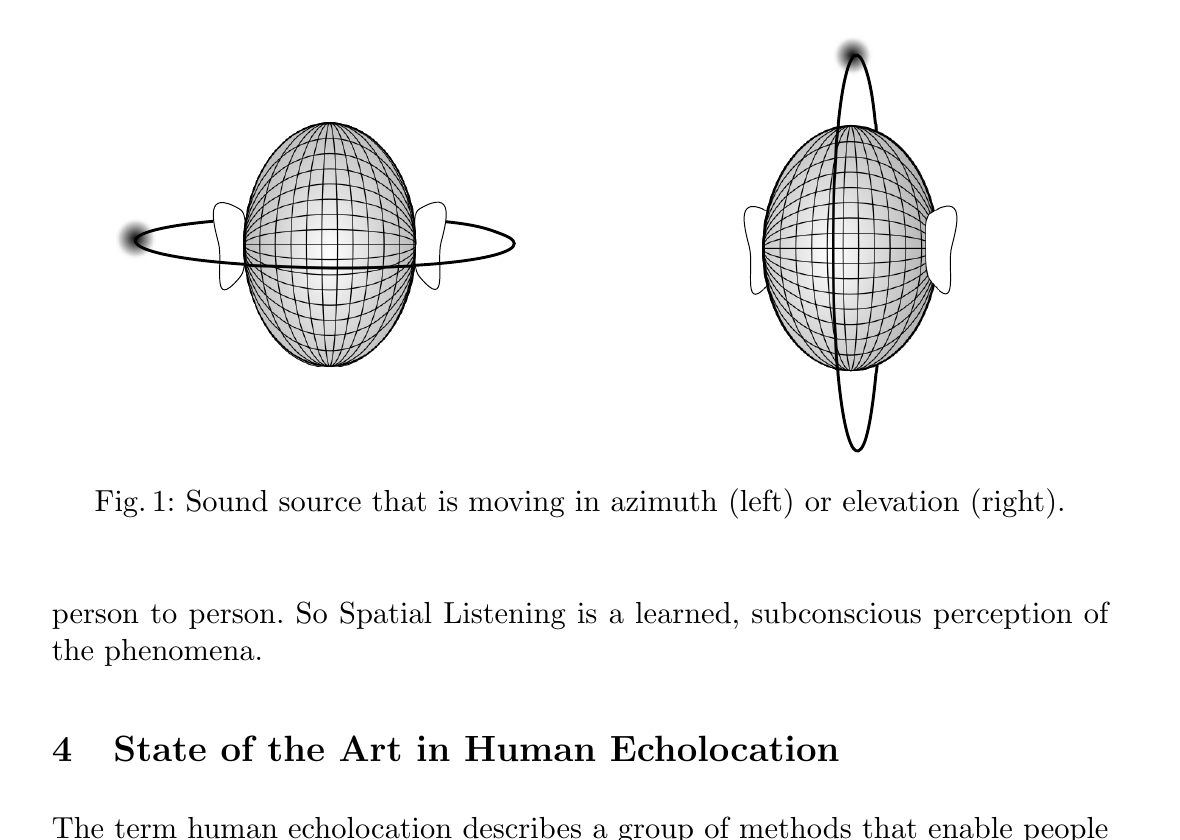
図1 方向表現の全体図。 -
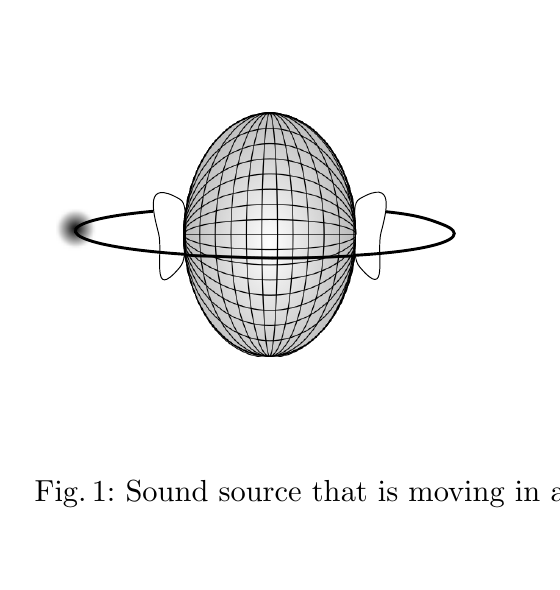
図1 左詳細(方位角)。 -
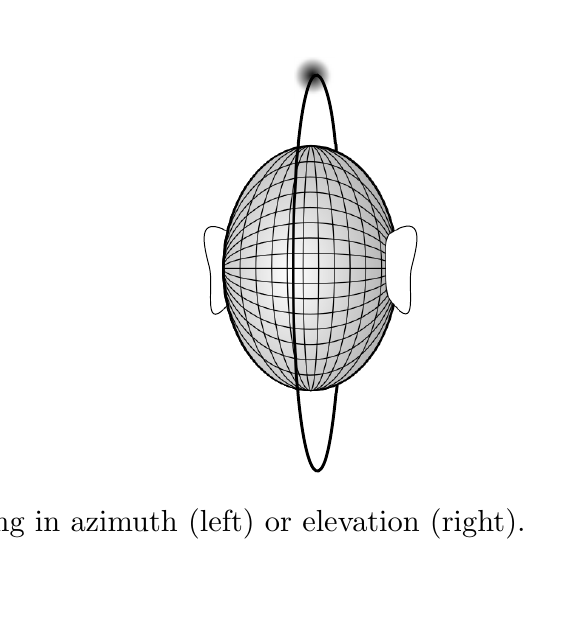
図1 右詳細(仰角)。 -
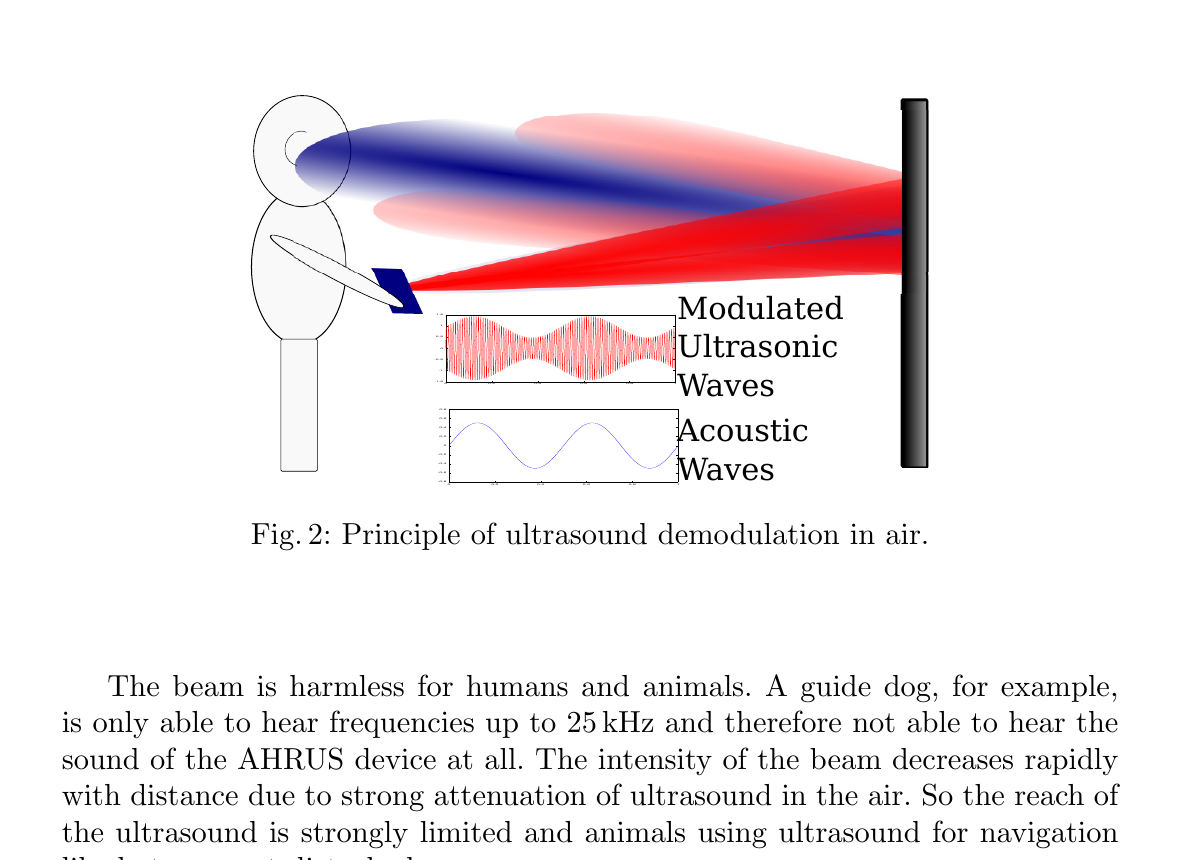
図2 超音波復調の原理。 -
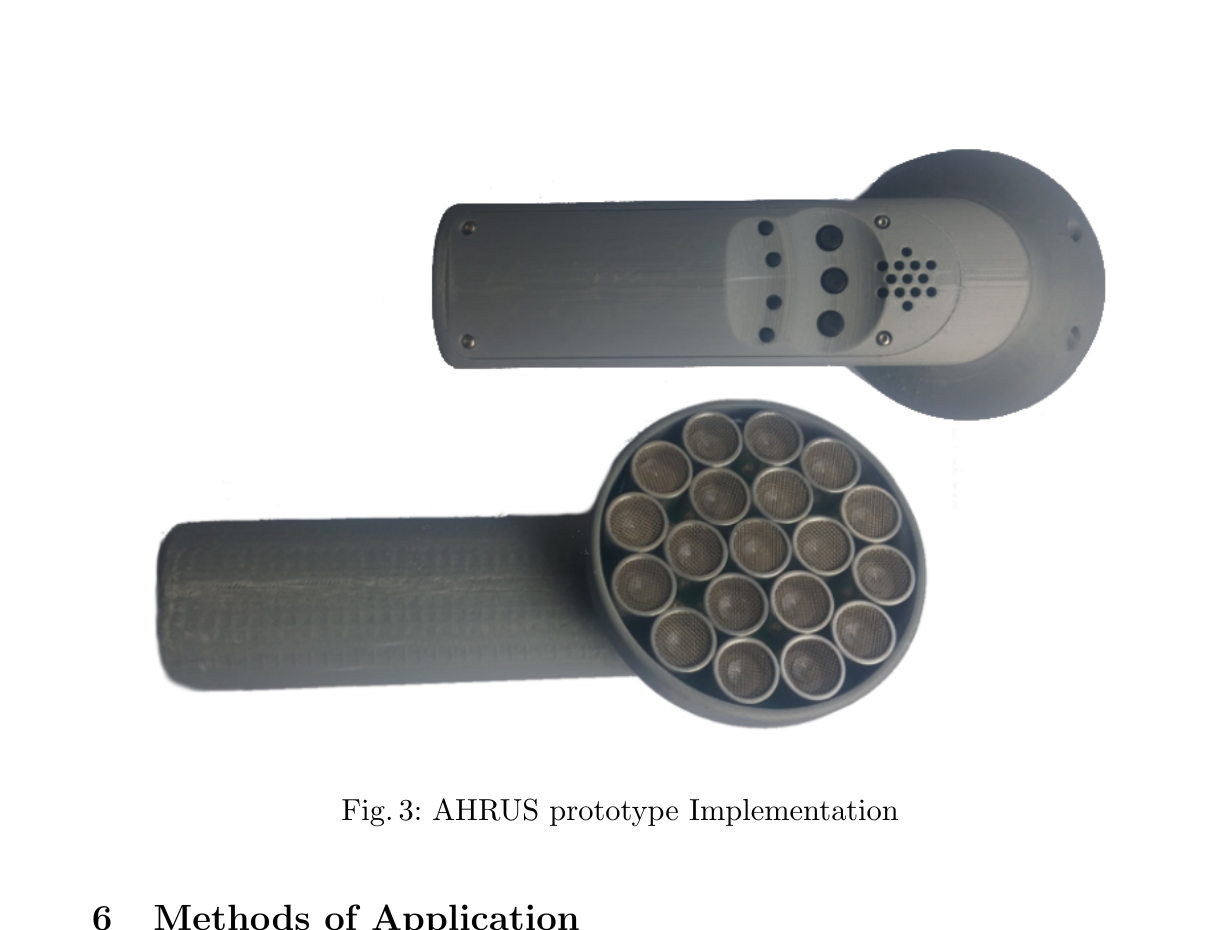
図3 プロトタイプ実装。 -
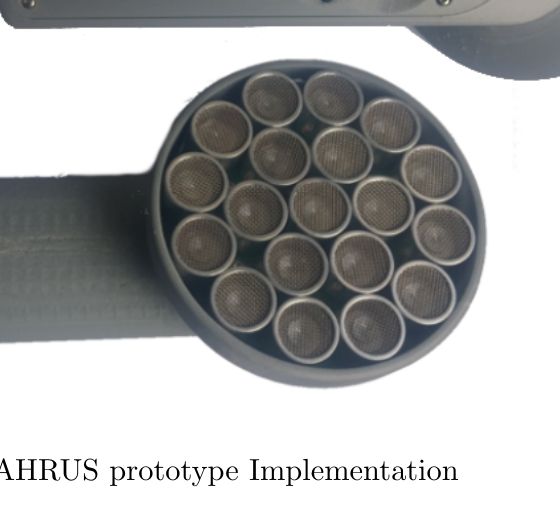
図3 トランスデューサアレイの詳細。 -
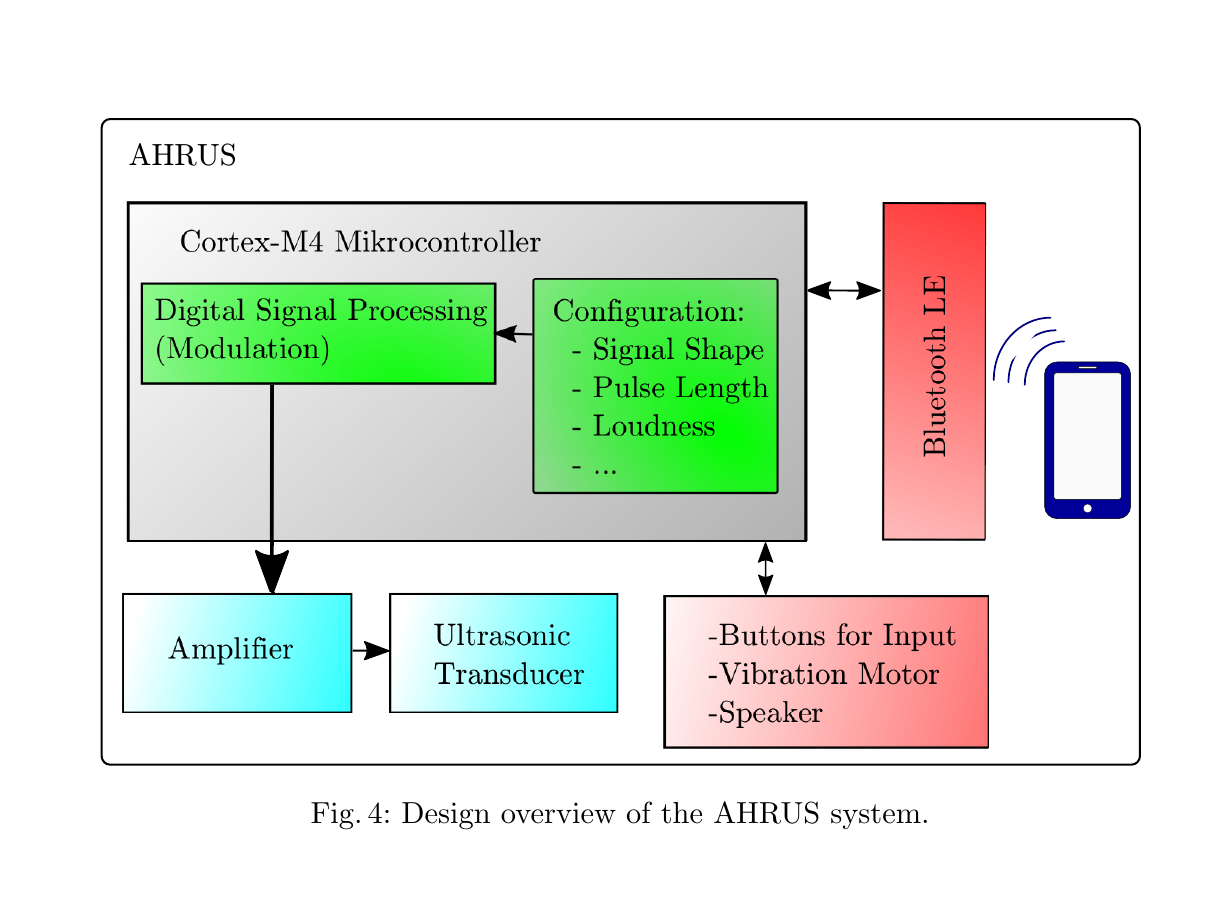
図4 AHRUS システム設計の概要。 -
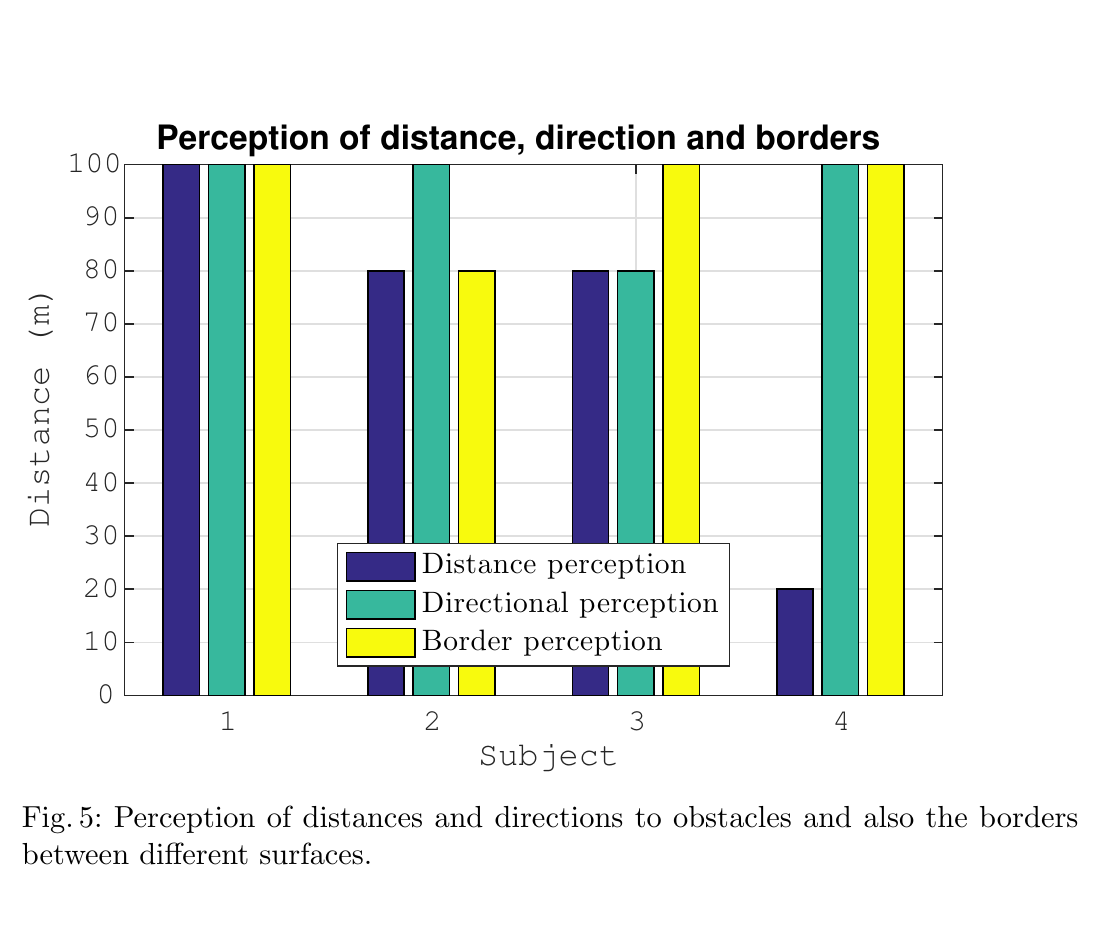
図5 距離・方向・境界知覚の結果。 -
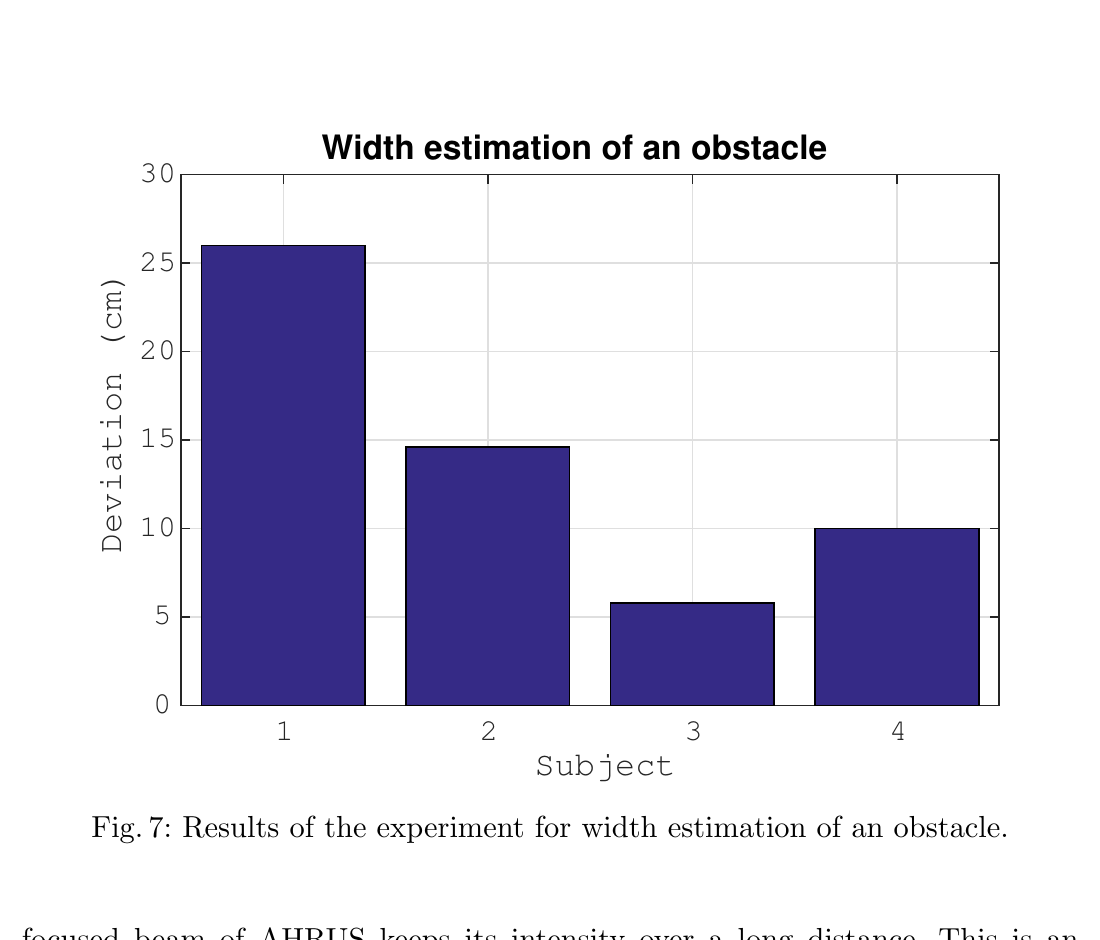
図6 障害物検出の距離しきい値。 -
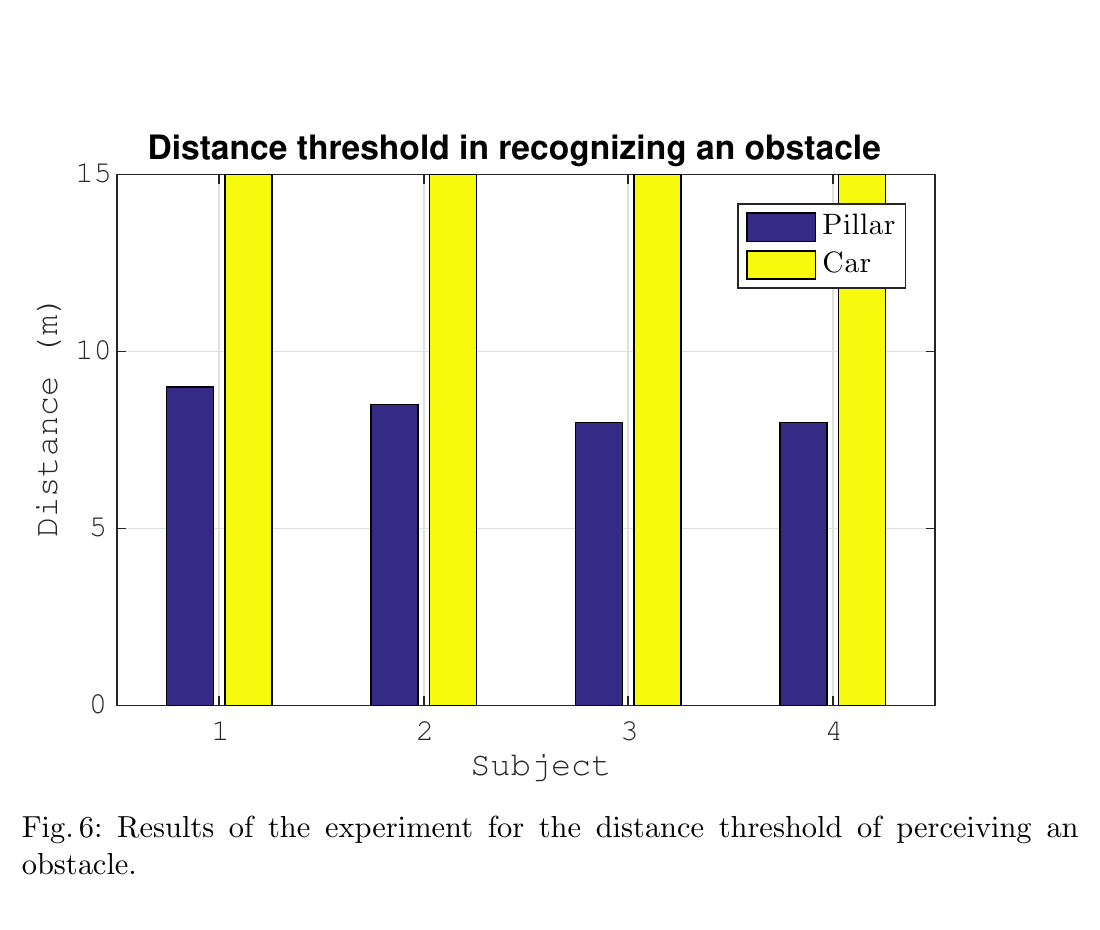
図7 障害物幅の推定。 -
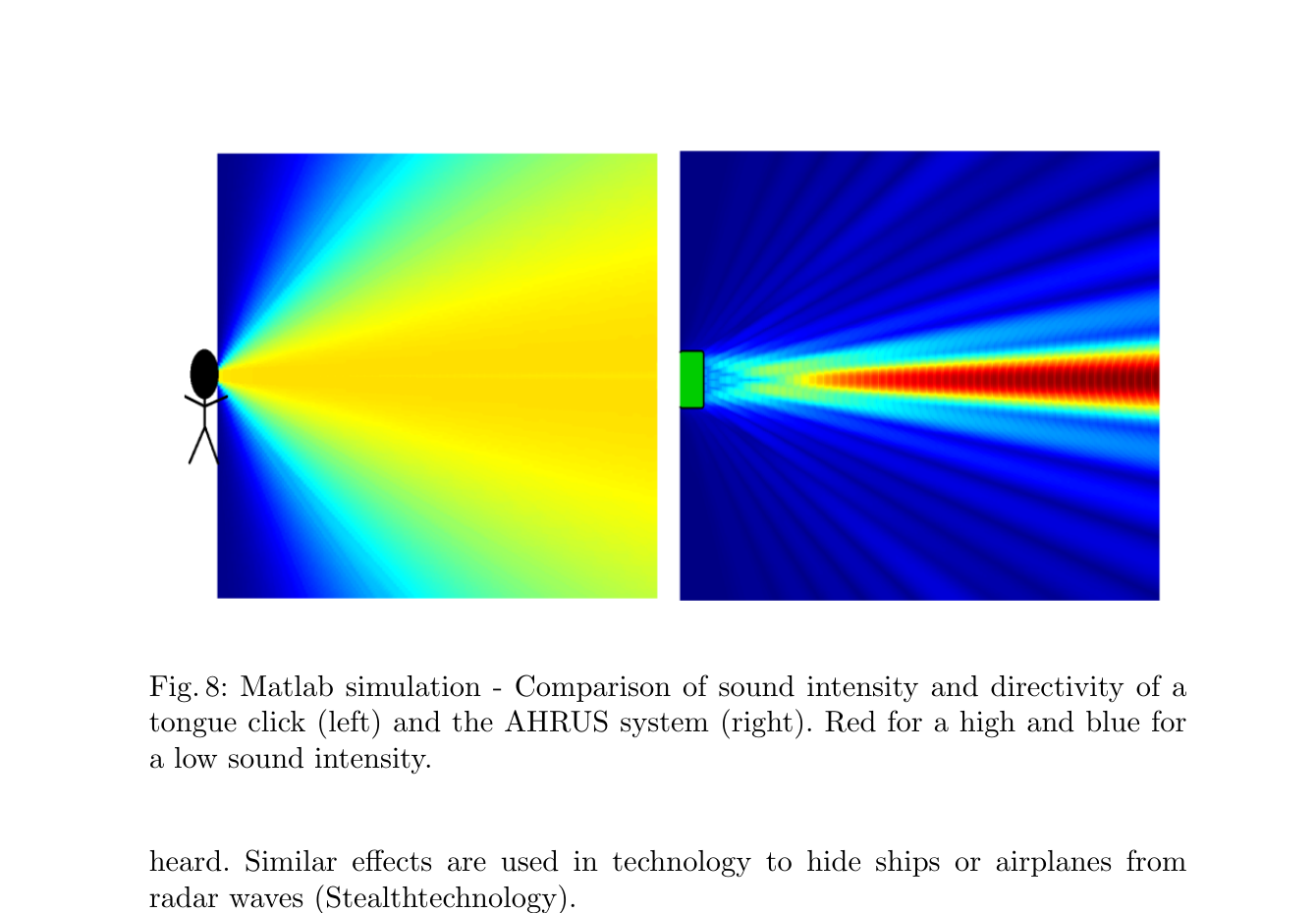
図8 指向性の全体比較。 -
図8 左詳細(Flash Sonar)。 -
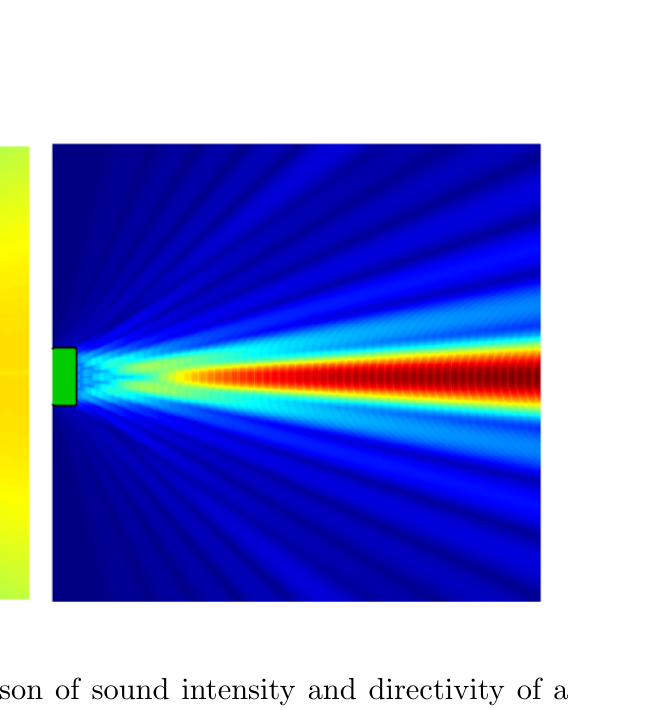
図8 右詳細(AHRUS)。












